Poduszkowiec wykonany ręcznie. poduszkowiec (poduszkowiec). Charakterystyka techniczna statku
Charakterystyka dużych prędkości i możliwości amfibii poduszkowców, a także względna prostota ich konstrukcji przyciągają uwagę projektantów amatorów. W ostatnich latach pojawiło się wiele małych WUA, budowanych samodzielnie i wykorzystywanych do celów sportowych, turystycznych czy wyjazdów służbowych.
W niektórych krajach, np. w Wielkiej Brytanii, USA i Kanadzie, rozpoczęto seryjną produkcję przemysłową małych WUA; Oferujemy gotowe urządzenia lub zestawy części do samodzielnego montażu.
Typowy sportowy AVP jest kompaktowy, prosty w konstrukcji, ma niezależne od siebie systemy podnoszenia i przemieszczania i można go łatwo przenosić zarówno nad ziemią, jak i nad wodą. Są to przeważnie pojazdy jednomiejscowe z gaźnikowym silnikiem motocyklowym lub lekkimi silnikami samochodowymi chłodzonymi powietrzem.
Turystyczne WUA mają bardziej złożoną konstrukcję. Są to zazwyczaj dwu- lub czteromiejscowe, przeznaczone na stosunkowo długie podróże i odpowiednio wyposażone w półki na bagaże, zbiorniki paliwa o dużej pojemności oraz urządzenia chroniące pasażerów przed złą pogodą.
Do celów gospodarczych wykorzystuje się małe platformy, przystosowane do transportu głównie towarów rolnych po nierównym i podmokłym terenie.
Główna charakterystyka
Amatorskie AVP charakteryzują się głównymi wymiarami, masą, średnicą doładowania i śmigła oraz odległością od środka masy AVP do środka jego oporu aerodynamicznego.W tabeli 1 porównuje najważniejsze dane techniczne najpopularniejszych angielskich amatorskich AVP. Tabela umożliwia poruszanie się po szerokim zakresie wartości poszczególnych parametrów i wykorzystanie ich do analiz porównawczych z własnymi projektami.
Najlżejsze WUA ważą około 100 kg, najcięższe - ponad 1000 kg. Naturalnie im mniejsza masa urządzenia, tym mniej mocy silnika potrzeba do jego poruszenia lub tym większą wydajność można uzyskać przy tym samym poborze mocy.
Poniżej znajdują się najbardziej typowe dane dotyczące masy poszczególnych elementów składających się na całkowitą masę amatorskiego AVP: silnik gaźnikowy chłodzony powietrzem - 20-70 kg; dmuchawa osiowa. (pompa) - 15 kg, pompa odśrodkowa - 20 kg; śmigło - 6-8 kg; rama silnika - 5-8 kg; transmisja - 5-8 kg; dysza pierścieniowa śmigła - 3-5 kg; kontrola - 5-7 kg; ciało - 50-80 kg; zbiorniki paliwa i przewody gazowe - 5-8 kg; siedzisko - 5 kg.
Całkowitą nośność określa się w drodze obliczeń w zależności od liczby pasażerów, danej ilości przewożonego ładunku, zapasów paliwa i oleju niezbędnych do zapewnienia wymaganego zasięgu przelotu.
Równolegle z obliczaniem masy AVP wymagane jest dokładne obliczenie położenia środka ciężkości, ponieważ od tego zależą właściwości jezdne, stabilność i sterowność urządzenia. Głównym warunkiem jest to, aby wypadkowa sił podtrzymujących poduszkę powietrzną przechodziła przez wspólny środek ciężkości (CG) urządzenia. Należy wziąć pod uwagę, że wszystkie masy zmieniające swoją wartość w trakcie pracy (takie jak paliwo, pasażerowie, ładunek) muszą być umieszczone blisko środka ciężkości urządzenia, tak aby nie powodować jego przemieszczania.
Środek ciężkości urządzenia wyznacza się poprzez obliczenia na podstawie rysunku rzutu bocznego urządzenia, na którym naniesione są środki ciężkości poszczególnych jednostek, elementów konstrukcyjnych pasażerów i ładunku (rys. 1). Znając masy G i oraz współrzędne (względem osi współrzędnych) x i oraz y i ich środków ciężkości, możemy wyznaczyć położenie środka ciężkości całego aparatu korzystając ze wzorów:

Zaprojektowany amatorski AVP musi spełniać określone wymagania operacyjne, projektowe i technologiczne. Podstawą do stworzenia projektu i konstrukcji nowego typu AVP są przede wszystkim wstępne dane i warunki techniczne, które określają typ urządzenia, jego przeznaczenie, masę całkowitą, nośność, wymiary, typ elektrowni głównej, właściwości jezdne i specyficzne cechy.
Od WUA turystyczno-sportowych, a także innych typów amatorskich WUA wymaga się łatwości wykonania, wykorzystania w konstrukcji łatwo dostępnych materiałów i podzespołów oraz pełnego bezpieczeństwa użytkowania.
Mówiąc o właściwościach jezdnych, mają na myśli wysokość zawisu AVP i związaną z tą jakością zdolność pokonywania przeszkód, maksymalną prędkość i reakcję przepustnicy, a także drogę hamowania, stabilność, sterowność i zasięg.
W konstrukcji AVP zasadniczą rolę odgrywa kształt korpusu (ryc. 2), będący kompromisem pomiędzy:
- a) okrągłe kontury, które charakteryzują się najlepszymi parametrami poduszki powietrznej w momencie zawisu w miejscu;
- b) kontury w kształcie łzy, co jest preferowane z punktu widzenia zmniejszenia oporu aerodynamicznego podczas ruchu;
- c) kształt kadłuba spiczasty w dziobie („dziób”), optymalny z hydrodynamicznego punktu widzenia podczas poruszania się po wzburzonym tafli wody;
- d) formę optymalną ze względów operacyjnych.
Wykorzystując dane statystyczne dotyczące istniejących konstrukcji, które odpowiadają nowo utworzonemu typowi WUA, projektant musi ustalić:
- waga aparatu G, kg;
- powierzchnia poduszki powietrznej S, m2;
- długość, szerokość i zarys ciała w rzucie;
- moc silnika układu podnoszenia N v.p. , kW;
- moc silnika trakcyjnego N silnik, kW.
- ciśnienie w poduszce powietrznej P v.p. = G:S;
- moc właściwa układu podnoszenia q v.p. = G:N rozdz. .
- moc właściwa silnika trakcyjnego q dv = G:N dv, a także rozpocząć opracowywanie konfiguracji AVP.
Zasada tworzenia poduszki powietrznej, doładowania
Najczęściej przy konstruowaniu amatorskich AVP stosuje się dwa schematy formowania poduszki powietrznej: komorę i dyszę.W konstrukcji komorowej, najczęściej stosowanej w prostych konstrukcjach, objętościowe natężenie przepływu powietrza przechodzącego przez ścieżkę powietrza urządzenia jest równe objętościowemu natężeniu przepływu doładowania
![]()
Gdzie:
F jest obszarem obwodu szczeliny między powierzchnią nośną a dolną krawędzią korpusu aparatu, przez którą powietrze wychodzi spod aparatu, m2; można go zdefiniować jako iloczyn obwodu płotu z poduszką powietrzną P i szczeliny h e pomiędzy płotem a powierzchnią nośną; zwykle h 2 = 0,7 0,8 h, gdzie h jest wysokością zawisu aparatu, m;
υ - prędkość wypływu powietrza spod aparatu; z wystarczającą dokładnością można to obliczyć ze wzoru:

gdzie R v.p. - ciśnienie w poduszce powietrznej, Pa; g - przyspieszenie swobodnego spadania, m/s 2 ; y - gęstość powietrza, kg/m3.
Moc niezbędną do wytworzenia poduszki powietrznej w obwodzie komory określa się według przybliżonego wzoru:

gdzie R v.p. - ciśnienie za doładowaniem (w odbiorniku), Pa; η n - wydajność doładowania.
Głównymi parametrami poduszki powietrznej są ciśnienie i przepływ powietrza w poduszce powietrznej. Ich wartości zależą przede wszystkim od wielkości aparatu, czyli od masy i powierzchni nośnej, od wysokości zawisu, prędkości ruchu, sposobu wytworzenia poduszki powietrznej oraz oporów na drodze powietrza.
Najbardziej ekonomiczne poduszkowce to te o dużych rozmiarach lub dużych powierzchniach nośnych, w których minimalne ciśnienie w poduszce pozwala uzyskać odpowiednio dużą nośność. Samodzielna konstrukcja aparatu o dużych gabarytach wiąże się jednak z trudnościami w transporcie i przechowywaniu, a także jest ograniczona możliwościami finansowymi projektanta-amatora. Zmniejszając rozmiar AVP, wymagany jest znaczny wzrost ciśnienia w poduszce powietrznej i odpowiednio wzrost zużycia energii.
Negatywne zjawiska zależą z kolei od ciśnienia w poduszce powietrznej i prędkości wypływu powietrza spod urządzenia: rozpryskiwania podczas poruszania się po wodzie i kurzu podczas poruszania się po piaszczystej powierzchni lub luźnym śniegu.
Najwyraźniej udany projekt WUA jest w pewnym sensie kompromisem pomiędzy sprzecznymi zależnościami opisanymi powyżej.
Aby zmniejszyć zużycie energii na przepływ powietrza przez kanał powietrzny ze sprężarki do wnęki poduszki, musi on mieć minimalny opór aerodynamiczny (ryc. 3). Straty mocy, które są nieuniknione, gdy powietrze przepływa przez kanały kanału powietrznego, są dwojakiego rodzaju: straty spowodowane ruchem powietrza w prostych kanałach o stałym przekroju oraz straty lokalne podczas rozszerzania i zginania kanałów.
W drogach powietrznych małych amatorskich AVP straty spowodowane ruchem strumieni powietrza wzdłuż prostych kanałów o stałym przekroju są stosunkowo niewielkie ze względu na niewielką długość tych kanałów, a także dokładną obróbkę ich powierzchni. Straty te można oszacować korzystając ze wzoru:

gdzie: λ – współczynnik straty ciśnienia na długość kanału, obliczony według wykresu pokazanego na rys. 4, w zależności od liczby Reynoldsa Re=(υ·d):v, υ - prędkość przepływu powietrza w kanale, m/s; l - długość kanału, m; d jest średnicą kanału, m (jeżeli kanał ma przekrój inny niż kołowy, to d jest równoważną w polu przekroju średnicą kanału cylindrycznego); v jest współczynnikiem lepkości kinematycznej powietrza, m 2 /s.
Lokalne straty mocy związane z silnym zwiększeniem lub zmniejszeniem przekroju kanałów i znacznymi zmianami kierunku przepływu powietrza, a także straty na zasysaniu powietrza do doładowania, dysz i sterów stanowią główne koszty mocy doładowania.

Tutaj ζ m jest lokalnym współczynnikiem strat zależnym od liczby Reynoldsa, która jest określona przez parametry geometryczne źródła strat i prędkość przepływu powietrza (ryc. 5-8).
Doładowanie w AVP musi wytworzyć określone ciśnienie powietrza w poduszce powietrznej, biorąc pod uwagę pobór mocy w celu pokonania oporu kanałów stawianego przepływowi powietrza. W niektórych przypadkach część strumienia powietrza wykorzystywana jest także do wytwarzania poziomego ciągu urządzenia w celu zapewnienia ruchu.
Całkowite ciśnienie wytworzone przez doładowanie jest sumą ciśnienia statycznego i dynamicznego:
![]()
W zależności od rodzaju AVP, powierzchni poduszki powietrznej, wysokości podnoszenia urządzenia i wielkości strat, składniki p sυ i p dυ są różne. Od tego zależy wybór typu i wydajności sprężarek.
W obwodzie poduszki powietrznej komory ciśnienie statyczne p sυ wymagane do wytworzenia siły nośnej można przyrównać do ciśnienia statycznego za doładowaniem, którego moc jest określona wzorem podanym powyżej.
Obliczając wymaganą moc doładowania AVP z elastyczną obudową poduszki powietrznej (konstrukcja dyszy), ciśnienie statyczne za doładowaniem można obliczyć za pomocą przybliżonego wzoru:
gdzie: R v.p. - ciśnienie w poduszce powietrznej pod spodem aparatu, kg/m2; kp jest współczynnikiem spadku ciśnienia pomiędzy poduszką powietrzną a kanałami (odbiornikiem), równym k p =P p:P v.p. (P p - ciśnienie w kanałach powietrznych za doładowaniem). Wartość k p waha się w granicach 1,25 1,5.
Objętościowe natężenie przepływu powietrza przez doładowanie można obliczyć ze wzoru:

Regulacja wydajności (przepływu) doładowań AVP odbywa się najczęściej poprzez zmianę prędkości obrotowej lub (rzadziej) poprzez dławienie przepływu powietrza w kanałach za pomocą umieszczonych w nich przepustnic obrotowych.
Po obliczeniu wymaganej mocy doładowania należy znaleźć dla niej silnik; Najczęściej hobbyści korzystają z silników motocyklowych, jeśli wymagana jest moc do 22 kW. W takim przypadku za moc obliczoną przyjmuje się 0,7-0,8 maksymalnej mocy silnika wskazanej w paszporcie motocykla. Konieczne jest zapewnienie intensywnego chłodzenia silnika i dokładne oczyszczenie powietrza wchodzącego przez gaźnik. Ważne jest również uzyskanie jednostki o minimalnej masie, na którą składa się masa silnika, przekładni pomiędzy doładowaniem a silnikiem, a także masa samej doładowania.
W zależności od rodzaju AVP stosuje się silniki o pojemności od 50 do 750 cm 3.
W amatorskich AVP w równym stopniu stosowane są zarówno doładowania osiowe, jak i odśrodkowe. Dmuchawy osiowe przeznaczone są do małych i prostych konstrukcji, dmuchawy odśrodkowe przeznaczone są do pomp powietrza o znacznym ciśnieniu w poduszce powietrznej.
Dmuchawy osiowe mają zazwyczaj cztery lub więcej łopatek (rysunek 9). Wykonywane są najczęściej z drewna (dmuchawy czterołopatowe) lub metalu (dmuchawy wielołopatkowe). Jeśli są wykonane ze stopów aluminium, wówczas wirniki można odlewać, a także spawać; można wykonać z nich konstrukcję spawaną z blachy stalowej. Zakres ciśnień wytwarzanych przez osiowe czterołopatkowe doładowania wynosi 600-800 Pa (około 1000 Pa przy dużej liczbie łopatek); Sprawność tych doładowań sięga 90%.
Dmuchawy odśrodkowe wykonane są ze spawanej konstrukcji metalowej lub formowane z włókna szklanego. Ostrza wykonane są gięte z cienkiej blachy lub o profilowanym przekroju. Dmuchawy odśrodkowe wytwarzają ciśnienie do 3000 Pa, a ich wydajność sięga 83%.
Wybór kompleksu trakcyjnego
Pędniki wytwarzające ciąg poziomy można podzielić głównie na trzy typy: powietrzne, wodne i kołowe (rys. 10).Napęd powietrzny oznacza śmigło typu lotniczego z pierścieniem dyszowym lub bez, osiową lub odśrodkową sprężarkę doładowującą, a także zespół napędowy oddychający powietrzem. W najprostszych konstrukcjach można czasami wytworzyć ciąg poziomy poprzez przechylenie AVP i wykorzystanie powstałej poziomej składowej siły strumienia powietrza wypływającego z poduszki powietrznej. Pneumatyczne urządzenie napędowe jest wygodne w przypadku amfibii, które nie mają kontaktu z powierzchnią nośną.
Jeśli mówimy o WUA poruszających się wyłącznie nad powierzchnią wody, wówczas można zastosować napęd śmigłowy lub strugowodny. W porównaniu z silnikami powietrznymi, pędniki te umożliwiają uzyskanie znacznie większego ciągu na każdy kilowat wydanej mocy.
Przybliżoną wartość ciągu wytwarzanego przez różne pędniki można oszacować na podstawie danych pokazanych na rys. jedenaście.
Przy wyborze elementów śmigła należy wziąć pod uwagę wszelkiego rodzaju opory jakie powstają podczas ruchu śmigła. Opór aerodynamiczny oblicza się za pomocą wzoru
![]()
Opór wody powodowany powstawaniem fal podczas poruszania się WUA w wodzie można obliczyć ze wzoru

Gdzie:
V - prędkość ruchu WUA, m/s; G to masa AVP, kg; L to długość poduszki powietrznej, m; ρ to gęstość wody, kg s 2 /m 4 (przy temperaturze wody morskiej +4°C wynosi 104, wody rzecznej 102);
C x oznacza współczynnik oporu aerodynamicznego, zależny od kształtu pojazdu; określa się poprzez oczyszczanie modeli AVP w tunelach aerodynamicznych. W przybliżeniu możemy przyjąć C x =0,3 0,5;
S jest polem przekroju WUA - jego rzutem na płaszczyznę prostopadłą do kierunku ruchu, m 2 ;
E jest współczynnikiem oporu fali zależnym od prędkości płata (liczba Froude'a Fr=V:√ g·L) i stosunku wymiarów poduszki powietrznej L:B (rys. 12).
Jako przykład w tabeli. Na rysunku 2 przedstawiono obliczenia oporu w zależności od prędkości ruchu dla urządzenia o długości L = 2,83 m i B = 1,41 m.

Znając opory ruchu urządzenia, można obliczyć moc silnika potrzebną do zapewnienia jego ruchu przy zadanej prędkości (w tym przykładzie 120 km/h), przyjmując sprawność śmigła η p równą 0,6 oraz przekładnię sprawność od silnika do śmigła η p =0,9:
Jako powietrzne urządzenie napędowe w amatorskich AVP najczęściej wykorzystuje się śmigło dwułopatowe (ryc. 13).
Półfabrykat na taką śrubę można skleić ze sklejki, jesionu lub płyt sosnowych. Krawędź, a także końcówki łopatek, które są narażone na działanie mechaniczne cząstek stałych lub piasku zasysanego wraz z przepływem powietrza, zabezpieczone są ramką z blachy mosiężnej.
Stosowane są również śmigła czterołopatowe. Liczba łopatek zależy od warunków pracy i przeznaczenia śmigła - do rozwijania dużej prędkości lub wytworzenia znacznej siły trakcyjnej w momencie startu. Wystarczającą przyczepność może również zapewnić dwułopatowe śmigło z szerokimi łopatkami. Siła ciągu z reguły wzrasta, jeśli śmigło pracuje w profilowanym pierścieniu dyszy.
Gotowe śmigło należy wyważyć, głównie statycznie, przed zamontowaniem na wale silnika. W przeciwnym razie podczas obracania się pojawią się wibracje, które mogą doprowadzić do uszkodzenia całego urządzenia. Dla amatorów w zupełności wystarczy wyważanie z dokładnością do 1 g. Oprócz wyważenia śmigła należy sprawdzić jego bicie względem osi obrotu.
Ogólny układ
Jednym z głównych zadań projektanta jest połączenie wszystkich jednostek w jedną funkcjonalną całość. Projektując pojazd, projektant ma obowiązek zapewnić w kadłubie miejsce dla załogi oraz rozmieszczenie zespołów układu podnoszącego i napędowego. Ważne jest, aby jako prototyp wykorzystać już znane projekty AVP. Na ryc. Rysunki 14 i 15 przedstawiają schematy projektowe dwóch typowych WUA budowanych amatorsko.W większości WUA nadwozie jest elementem nośnym, pojedynczą konstrukcją. Zawiera główne zespoły napędowe, kanały powietrzne, urządzenia sterujące i kabinę maszynisty. Kabiny kierowcy zlokalizowane będą na dziobie lub w centralnej części pojazdu, w zależności od tego, gdzie zlokalizowana jest sprężarka – za kabiną czy przed nią. Jeśli AVP jest wielomiejscowy, kabina zwykle znajduje się w środkowej części urządzenia, co pozwala na obsługę go przy różnej liczbie osób na pokładzie bez zmiany ustawienia.
W małych amatorskich AVP fotel kierowcy jest najczęściej otwarty, chroniony z przodu przednią szybą. W urządzeniach o bardziej złożonej konstrukcji (typu turystycznego) kabiny są zamknięte kopułą wykonaną z przezroczystego tworzywa sztucznego. Aby pomieścić niezbędny sprzęt i zapasy, wykorzystano przestrzenie dostępne po bokach kabiny i pod siedzeniami.
W przypadku silników powietrznych sterowanie AVP odbywa się za pomocą sterów umieszczonych w strumieniu powietrza za śmigłem lub urządzeń prowadzących zamontowanych w strumieniu powietrza wypływającego z silnika napędowego oddychającego powietrzem. Sterowanie urządzeniem z siedzenia kierowcy może mieć charakter lotniczy – za pomocą uchwytów lub dźwigni przy kierownicy, lub jak w samochodzie – za pomocą kierownicy i pedałów.
Istnieją dwa główne typy układów paliwowych stosowanych w amatorskich AVP; z grawitacyjnym zasilaniem paliwem oraz z pompą paliwową samochodową lub lotniczą. Części układu paliwowego, takie jak zawory, filtry, układ olejowy ze zbiornikami (jeśli używany jest silnik czterosuwowy), chłodnice oleju, filtry, układ chłodzenia wodą (jeśli jest to silnik chłodzony wodą), są zwykle wybierane z istniejących samolotów lub części samochodowe.
Spaliny z silnika są zawsze odprowadzane do tyłu pojazdu, nigdy do poduszki. Aby ograniczyć hałas powstający podczas pracy WUA, zwłaszcza w pobliżu obszarów zaludnionych, stosuje się tłumiki typu samochodowego.
W najprostszych konstrukcjach dolna część nadwozia służy jako podwozie. Rolę podwozia mogą pełnić drewniane płozy (lub płozy), które przejmują obciążenie w kontakcie z nawierzchnią. W turystycznych WUA, które są cięższe od sportowych, montuje się podwozia kołowe, które ułatwiają przemieszczanie się WUA podczas postojów. Zwykle stosuje się dwa koła, instalowane po bokach lub wzdłuż osi podłużnej WUA. Koła mają kontakt z powierzchnią dopiero wtedy, gdy system podnoszenia przestaje działać, kiedy AVP dotknie powierzchni.
Materiały i technologia wykonania
Do produkcji konstrukcji drewnianych wykorzystuje się wysokiej jakości tarcicę sosnową, podobną do tej stosowanej w budowie samolotów, a także sklejkę brzozową, drewno jesionowe, bukowe i lipowe. Do klejenia drewna stosuje się klej wodoodporny o wysokich właściwościach fizyko-mechanicznych.Do ogrodzeń elastycznych stosuje się głównie tkaniny techniczne; muszą być niezwykle trwałe, odporne na warunki atmosferyczne i wilgoć, a także na tarcie.W Polsce najczęściej stosuje się tkaniny ognioodporne powlekane tworzywem sztucznym polichlorkiem winylu.
Ważne jest prawidłowe wykonanie cięcia i staranne połączenie paneli ze sobą, a także ich zamocowanie do urządzenia. Do mocowania skorupy płotu elastycznego do korpusu stosuje się listwy metalowe, które za pomocą śrub równomiernie dociskają tkaninę do korpusu urządzenia.
Projektując kształt elastycznej obudowy poduszki powietrznej nie należy zapominać o prawie Pascala, które głosi, że ciśnienie powietrza rozchodzi się we wszystkich kierunkach z tą samą siłą. Dlatego skorupa płotu elastycznego w stanie napompowanym powinna mieć kształt walca, kuli lub ich kombinacji.
Konstrukcja i wytrzymałość obudowy
Na korpus AVP przenoszone są siły pochodzące od ładunku przewożonego przez urządzenie, ciężar mechanizmów elektrowni itp., a także obciążenia od sił zewnętrznych, uderzenia dna o falę i ciśnienie w poduszce powietrznej. Konstrukcją nośną kadłuba sterowca amatorskiego jest najczęściej płaski ponton, który podtrzymywany jest ciśnieniem w poduszce powietrznej, a w trybie pływania zapewnia kadłubowi pływalność. Na nadwozie działają siły skupione, momenty zginające i moment obrotowy pochodzące od silników (ryc. 16), a także momenty żyroskopowe pochodzące od wirujących części mechanizmów, które powstają podczas manewrowania AVP.Najszerzej stosowane są dwa typy konstrukcyjne kadłubów amatorskich AVP (lub ich kombinacje):
- konstrukcja kratownicowa, gdy ogólna wytrzymałość kadłuba jest zapewniona za pomocą kratownic płaskich lub przestrzennych, a poszycie ma jedynie na celu zatrzymanie powietrza na drodze powietrza i wytworzenie objętości wyporu;
- z okładzinami nośnymi, gdy ogólną wytrzymałość kadłuba zapewnia okładzina zewnętrzna, współpracująca z konstrukcją wzdłużną i poprzeczną.
Konstrukcja kabiny i jej przeszklenia muszą umożliwiać kierowcy i pasażerom szybkie opuszczenie kabiny, zwłaszcza w razie wypadku lub pożaru. Umiejscowienie okien powinno zapewniać kierowcy dobry widok: linia obserwacji powinna mieścić się w zakresie od 15° w dół do 45° w górę od linii poziomej; widoczność boczna musi wynosić co najmniej 90° z każdej strony.
Przeniesienie mocy na śmigło i doładowanie
Najprostsze do amatorskiej produkcji są napędy pasowe i łańcuchowe. Napęd łańcuchowy służy jednak tylko do napędzania śmigieł lub doładowań, których osie obrotu są usytuowane poziomo i nawet wtedy tylko wtedy, gdy istnieje możliwość dobrania odpowiednich zębatek motocyklowych, ponieważ ich wykonanie jest dość trudne.W przypadku przekładni pasowej, aby zapewnić trwałość pasów, należy dobierać maksymalne średnice kół pasowych, przy czym prędkość obwodowa pasów nie powinna przekraczać 25 m/s.
Projekt kompleksu podnoszącego i ogrodzenia elastycznego
Zespół podnoszący składa się z dmuchawy, kanałów powietrznych, odbiornika i elastycznej obudowy poduszki powietrznej (w obwodach dysz). Kanały, którymi powietrze dostarczane jest z dmuchawy do elastycznej obudowy, muszą być zaprojektowane z uwzględnieniem wymagań aerodynamiki i zapewniać minimalne straty ciśnienia.Ogrodzenia elastyczne dla amatorskich WUA mają zazwyczaj uproszczony kształt i konstrukcję. Na ryc. Na rysunku 18 przedstawiono przykładowe schematy konstrukcyjne płotów elastycznych oraz sposób sprawdzania kształtu płotu elastycznego po jego zamontowaniu na korpusie urządzenia. Ogrodzenia tego typu charakteryzują się dobrą elastycznością, a dzięki zaokrąglonemu kształtowi nie przylegają do nierównych powierzchni nośnych.
Obliczenia doładowań, zarówno osiowych, jak i odśrodkowych, są dość złożone i można je wykonać wyłącznie przy użyciu specjalnej literatury.
Urządzenie sterujące z reguły składa się z kierownicy lub pedałów, układu dźwigni (lub okablowania kablowego) połączonych ze sterem pionowym, a czasem ze sterem poziomym - windą.
Sterowanie może odbywać się w formie kierownicy samochodu lub motocykla. Biorąc jednak pod uwagę specyfikę konstrukcji i działania AVP jako statku powietrznego, często wykorzystują one konstrukcję lotniczą ze sterowaniem w postaci dźwigni lub pedałów. W najprostszej postaci (rys. 19), przy przechyleniu rączki na bok, ruch przekazywany jest poprzez przymocowaną do rury dźwignię na elementy okablowania linki sterowej, a następnie na ster. Ruchy klamki do przodu i do tyłu, możliwe dzięki konstrukcji na zawiasach, przenoszone są przez popychacz umieszczony wewnątrz rury na okablowanie windy.
Przy sterowaniu pedałami, niezależnie od jego konstrukcji, konieczne jest zapewnienie możliwości poruszania siedzeniem lub pedałami w celu dostosowania go zgodnie z indywidualnymi cechami kierowcy. Dźwignie są najczęściej wykonane z duraluminium, rury transmisyjne mocowane są do korpusu za pomocą wsporników. Ruch dźwigni jest ograniczony przez otwory wycięć w prowadnicach zamontowanych po bokach urządzenia.
Przykładową konstrukcję steru w przypadku jego umieszczenia w strumieniu powietrza wyrzucanego przez śmigło pokazano na rys. 20.
Stery mogą być całkowicie obrotowe lub składać się z dwóch części - części stałej (stabilizatora) i części obrotowej (płetwy steru) o różnych proporcjach procentowych cięciw tych części. Profile przekroju poprzecznego każdego rodzaju kierownicy muszą być symetryczne. Stabilizator układu kierowniczego jest zwykle zamontowany na stałe na nadwoziu; Głównym elementem nośnym stabilizatora jest drzewce, do którego zamocowana jest przegubowo płetwa steru. Windy, bardzo rzadko spotykane w amatorskich AVP, są projektowane według tych samych zasad, a czasem nawet są dokładnie takie same jak stery.
Elementy konstrukcyjne przenoszące ruch ze sterowania na kierownice i przepustnice silników zwykle składają się z dźwigni, drążków, linek itp. Za pomocą prętów z reguły siły przenoszone są w obu kierunkach, podczas gdy liny działają tylko dla trakcji. Najczęściej amatorskie AVP korzystają z systemów kombinowanych - z kablami i popychaczami.
Od redaktora
Poduszkowce coraz częściej przyciągają uwagę miłośników sportów wodno-motorowych i turystyki. Przy stosunkowo niewielkim poborze mocy pozwalają na osiągnięcie dużych prędkości; dostępne są dla nich płytkie i nieprzejezdne rzeki; Poduszkowiec może unosić się zarówno nad ziemią, jak i nad lodem.Po raz pierwszy w problematykę projektowania małych poduszkowców wprowadziliśmy czytelników już w numerze 4 (1965), publikując artykuł Yu.A. Budnickiego „Szybujące statki”. Opublikowano krótki zarys rozwoju zagranicznych poduszkowców, zawierający opis szeregu nowoczesnych poduszkowców sportowych i rekreacyjnych 1- i 2-miejscowych. Redaktorzy przybliżyli doświadczenia samodzielnego zbudowania takiego urządzenia przez mieszkańca Rygi O. O. Petersona w. Szczególnie duże zainteresowanie wśród naszych czytelników wzbudziła publikacja poświęcona tej amatorskiej konstrukcji. Wielu z nich chciało zbudować takiego samego płaza i prosiło o niezbędną literaturę.
W tym roku nakładem wydawnictwa Sudostroenie ukazuje się książka polskiego inżyniera Jerzego Bena „Modele i poduszkowiec amatorski”. Znajdziecie w nim prezentację podstawowej teorii powstawania poduszki powietrznej oraz mechaniki ruchu na niej. Autor podaje obliczone zależności niezbędne przy samodzielnym projektowaniu najprostszego poduszkowca, przedstawia trendy i perspektywy rozwoju tego typu statków. Książka zawiera wiele przykładów projektów amatorskich poduszkowców (AHV) budowanych w Wielkiej Brytanii, Kanadzie, USA, Francji i Polsce. Książka skierowana jest do szerokiego grona miłośników samodzielnego budowania statków, modelarzy statków i miłośników jednostek pływających. Tekst jest bogato ilustrowany rysunkami, rysunkami i fotografiami.
W czasopiśmie publikuje się skrócone tłumaczenie rozdziału tej książki.
Cztery najpopularniejsze zagraniczne poduszkowce
Amerykański poduszkowiec „Airskat-240”
Poduszkowiec sportowy dwuosobowy z poprzecznie symetrycznym układem siedzeń. Instalacja mechaniczna - samochód. dw. Volkswagen o mocy 38 kW, napędzający osiową czterołopatową doładowanie i dwułopatowe śmigło w pierścieniu. Sterowanie poduszkowcem na trasie odbywa się za pomocą dźwigni połączonej z systemem sterów umieszczonych w przepływie za śmigłem. Wyposażenie elektryczne 12 V. Rozruch silnika - rozrusznik elektryczny. Wymiary urządzenia to 4,4x1,98x1,42 m. Powierzchnia poduszki powietrznej - 7,8 m 2; średnica śmigła 1,16 m, masa całkowita – 463 kg, maksymalna prędkość na wodzie 64 km/h.Amerykański poduszkowiec firmy Skimmers Inc.
Rodzaj jednomiejscowego skutera poduszkowców. Konstrukcja obudowy opiera się na pomyśle wykorzystania kamery samochodowej. Dwucylindrowy silnik motocyklowy o mocy 4,4 kW. Wymiary urządzenia to 2,9x1,8x0,9 m. Powierzchnia poduszki powietrznej - 4,0 m 2; masa całkowita - 181 kg. Maksymalna prędkość - 29 km/h.Angielski poduszkowiec „Air Ryder”
Ten dwumiejscowy aparat sportowy jest jednym z najpopularniejszych wśród szkutników-amatorów. Osiowa sprężarka napędzana jest silnikiem motocykla. objętość robocza 250 cm3. Śmigło jest dwułopatowe, drewniane; Zasilany oddzielnym silnikiem o mocy 24 kW. Sprzęt elektryczny o napięciu 12 V z akumulatorem lotniczym. Rozruch silnika odbywa się za pomocą rozrusznika elektrycznego. Urządzenie ma wymiary 3,81x1,98x2,23 m; prześwit 0,03 m; wzniesienie 0,077 m; powierzchnia poduszek 6,5 m2; masa własna 181 kg. Rozwija prędkość 57 km/h na wodzie, 80 km/h na lądzie; pokonuje wzniesienia do 15°.Tabela 1 przedstawia dane dla jednomiejscowej modyfikacji urządzenia.
Angielski starszy wiceprezes „Hovercat”
Lekka łódź turystyczna dla pięciu do sześciu osób. Istnieją dwie modyfikacje: „MK-1” i „MK-2”. Pojazd napędzany jest odśrodkową sprężarką doładowującą o średnicy 1,1 m. dw. Volkswagen ma pojemność skokową 1584 cm 3 i pobiera moc 34 kW przy 3600 obr/min.W modyfikacji MK-1 ruch odbywa się za pomocą śmigła o średnicy 1,98 m, napędzanego drugim silnikiem tego samego typu.
W modyfikacji MK-2 samochód służy do trakcji poziomej. dw. Porsche 912 o pojemności 1582 cm 3 i mocy 67 kW. Sterowanie aparatem odbywa się za pomocą sterów aerodynamicznych umieszczonych w strumieniu za śmigłem. Urządzenia elektryczne o napięciu 12 V. Wymiary urządzenia 8,28 x 3,93 x 2,23 m. Powierzchnia poduszki powietrznej 32 m 2, masa całkowita urządzenia 2040 kg, prędkość modyfikacji „MK-1” – 47 km/h,” MK-2” – 55 km/h
Notatki
1. Podano uproszczoną metodę doboru śmigła w oparciu o znaną wartość oporu, prędkość obrotową i prędkość jazdy.2. Obliczenia napędów pasowych i łańcuchowych można wykonać w oparciu o normy ogólnie przyjęte w krajowej inżynierii mechanicznej.
Prototypem prezentowanej amfibii był pojazd na poduszce powietrznej (AVP) o nazwie „Aerojeep”, o którym ukazała się publikacja w czasopiśmie. Podobnie jak poprzednie urządzenie, nowa maszyna jest jednosilnikowa, jednośmigłowa z rozproszonym przepływem powietrza. Ten model również jest trzymiejscowy, z pilotem i pasażerami ułożonymi w kształcie litery T: pilot znajduje się z przodu pośrodku, a pasażerowie po bokach, z tyłu. Chociaż nic nie stoi na przeszkodzie, aby czwarty pasażer siedział za plecami kierowcy - długość siedzenia i moc silnika śmigłowego są wystarczające.
Nowa maszyna, oprócz ulepszonych właściwości technicznych, ma szereg cech konstrukcyjnych, a nawet innowacji, które zwiększają jej niezawodność działania i przeżywalność - w końcu płaz to ptactwo wodne. Nazywam go „ptakiem”, ponieważ wciąż porusza się w powietrzu zarówno nad wodą, jak i nad lądem.
Strukturalnie nowa maszyna składa się z czterech głównych części: korpusu z włókna szklanego, cylindra pneumatycznego, elastycznego płotu (osłony) i zespołu śmigła.
Mówiąc o nowym samochodzie, nieuchronnie będziesz musiał się powtarzać - w końcu projekty są w dużej mierze podobne.
Korpus Amfibii identyczny z prototypem zarówno pod względem wielkości, jak i konstrukcji - włókno szklane, podwójne, trójwymiarowe, składające się z powłoki wewnętrznej i zewnętrznej. Warto w tym miejscu zaznaczyć, że otwory w wewnętrznej skorupie nowego urządzenia znajdują się teraz nie przy górnej krawędzi boków, ale mniej więcej pośrodku pomiędzy nią a dolną krawędzią, co zapewnia szybsze i stabilniejsze tworzenie poduszka powietrzna. Same otwory nie są teraz podłużne, ale okrągłe, o średnicy 90 mm. Jest ich około 40 i są rozmieszczone równomiernie wzdłuż boków i przodu.
Każda skorupa została wklejona do własnej matrycy (zastosowanej z poprzedniego projektu) z dwóch do trzech warstw włókna szklanego (a spód z czterech warstw) na spoiwie poliestrowym. Oczywiście żywice te ustępują żywicom winyloestrowym i epoksydowym pod względem przyczepności, stopnia filtracji, skurczu i uwalniania szkodliwych substancji po wyschnięciu, ale mają niezaprzeczalną przewagę cenową - są znacznie tańsze, co ważne. Dla tych, którzy zamierzają stosować takie żywice, przypominam, że pomieszczenie, w którym prowadzone są prace, musi mieć dobrą wentylację i temperaturę co najmniej +22°C.
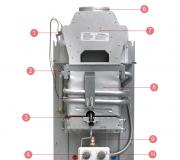
1 – segment (zestaw 60 szt.); 2 – balon; 3 – knaga cumownicza (3 szt.); 4 – osłona przeciwwiatrowa; 5 – poręcz (2 szt.); 6 – osłona siatkowa śmigła; 7 – zewnętrzna część kanału pierścieniowego; 8 – ster (2 szt.); 9 – dźwignia sterowania na kierownicy; 10 – właz w tunelu umożliwiający dostęp do zbiornika paliwa i akumulatora; 11 – fotel pilota; 12 – kanapa pasażerska; 13 – obudowa silnika; 14 – wiosło (2 szt.); 15 – tłumik; 16 – wypełniacz (pianka); 17 – wewnętrzna część kanału pierścieniowego; 18 – światło drogowe; 19 – śmigło; 20 – piasta śmigła; 21 – pasek zębaty napędu; 22 – punkt mocowania butli do nadwozia; 23 – punkt mocowania segmentu do nadwozia; 24 – silnik na wsporniku silnika; 25 – wewnętrzna skorupa ciała; 26 – wypełniacz (pianka); 27 – płaszcz zewnętrzny obudowy; 28 – panel rozdzielający wymuszony przepływ powietrza
Matryce wykonano wcześniej według modelu wzorcowego z tych samych mat szklanych na tej samej żywicy poliestrowej, jedynie grubość ich ścianek była większa i wynosiła 7-8 mm (dla skorup obudowy - około 4 mm). Przed wypieczeniem elementów z powierzchni roboczej matrycy dokładnie usunięto wszelkie nierówności i zadziory, a następnie pokryto ją trzykrotnie woskiem rozcieńczonym terpentyną i wypolerowano. Następnie za pomocą natryskiwacza (lub wałka) na powierzchnię nałożono cienką warstwę (do 0,5 mm) czerwonego żelkotu (kolorowego lakieru).
Po wyschnięciu rozpoczął się proces klejenia skorupy przy użyciu następującej technologii. Najpierw za pomocą wałka woskową powierzchnię matrycy i jedną stronę maty szklanej (o mniejszych porach) pokrywa się żywicą, następnie matę nakłada się na matrycę i wałkuje do całkowitego usunięcia powietrza spod warstwy (w razie potrzeby można zrobić w macie małą szczelinę). W ten sam sposób układa się kolejne warstwy mat szklanych na wymaganą grubość (3-4 mm), w razie potrzeby montując wtopione elementy (metal i drewno). Przy klejeniu „na mokro” odcięto nadmiar klapek wzdłuż krawędzi.

a – skorupa zewnętrzna;
b – skorupa wewnętrzna;
1 – narta (drzewo);
2 – płyta podsilnika (drewno)
Po wykonaniu oddzielnie skorupy zewnętrznej i wewnętrznej, połączono je, sczepiono za pomocą opasek zaciskowych i wkrętów samogwintujących, a następnie sklejono po obwodzie paskami pokrytymi żywicą poliestrową tej samej maty szklanej o szerokości 40-50 mm, z których wykonano muszle. sami zostali stworzeni. Po przymocowaniu muszli do krawędzi za pomocą nitów płatkowych, na obwodzie przymocowano pionową listwę boczną wykonaną z paska duraluminium o grubości 2 mm i szerokości co najmniej 35 mm.
Dodatkowo należy dokładnie przykleić kawałki włókna szklanego impregnowanego żywicą we wszystkich narożnikach i miejscach wkręcania łączników. Zewnętrzna powłoka pokryta jest od góry żelkotem – żywicą poliestrową z dodatkami akrylowymi i woskiem, która nadaje połysk i wodoodporność.
Warto dodać, że w tej samej technologii sklejono mniejsze elementy (wykonano skorupę zewnętrzną i wewnętrzną): osłonę wewnętrzną i zewnętrzną dyfuzora, kierownice, obudowę silnika, owiewkę, tunel i fotel kierowcy. Zbiornik gazu o pojemności 12,5 litra (przemysłowy z Włoch) wkładany jest wewnątrz obudowy, do konsoli, przed przymocowaniem dolnej i górnej części obudowy.

wewnętrzna skorupa obudowy z wylotami powietrza tworzącymi poduszkę powietrzną; nad otworami rząd zacisków kablowych służących do zaczepienia końców szala segmentu spódnicy; dwie drewniane narty przyklejone do spodu
Tym, którzy dopiero zaczynają pracę z włóknem szklanym, polecam rozpocząć budowę łodzi z tych drobnych elementów. Całkowita waga korpusu z włókna szklanego wraz z nartami i listwą ze stopu aluminium, dyfuzorem i sterami wynosi od 80 do 95 kg.
 Przestrzeń pomiędzy skorupami służy jako kanał powietrzny na obwodzie aparatu od rufy po obu stronach do dziobu. Górna i dolna część tej przestrzeni wypełniona jest pianką konstrukcyjną, która zapewnia optymalny przekrój kanałów powietrznych i dodatkową pływalność (a tym samym przeżywalność) urządzenia. Tym samym spoiwem poliestrowym sklejono kawałki styropianu, a do skorup przyklejono je paskami włókna szklanego, również impregnowanego żywicą. Następnie z kanałów powietrznych powietrze wydostaje się przez równomiernie rozmieszczone otwory o średnicy 90 mm w powłoce zewnętrznej, „opiera się” na segmentach osłony i tworzy pod urządzeniem poduszkę powietrzną.
Przestrzeń pomiędzy skorupami służy jako kanał powietrzny na obwodzie aparatu od rufy po obu stronach do dziobu. Górna i dolna część tej przestrzeni wypełniona jest pianką konstrukcyjną, która zapewnia optymalny przekrój kanałów powietrznych i dodatkową pływalność (a tym samym przeżywalność) urządzenia. Tym samym spoiwem poliestrowym sklejono kawałki styropianu, a do skorup przyklejono je paskami włókna szklanego, również impregnowanego żywicą. Następnie z kanałów powietrznych powietrze wydostaje się przez równomiernie rozmieszczone otwory o średnicy 90 mm w powłoce zewnętrznej, „opiera się” na segmentach osłony i tworzy pod urządzeniem poduszkę powietrzną.
Aby zabezpieczyć się przed uszkodzeniami, od spodu zewnętrznego poszycia kadłuba przykleja się parę podłużnych nart wykonanych z drewnianych klocków, a do tylnej części kokpitu przykleja się drewnianą płytę pod silnikiem (tj. od środka).
Balon. Nowy model poduszkowca ma prawie dwukrotnie większą wyporność (350 – 370 kg) od poprzedniego. Osiągnięto to poprzez zainstalowanie nadmuchiwanego balonu pomiędzy korpusem a segmentami elastycznego płotu (spódnicy). Cylinder jest sklejony z folii PVC na bazie lawsanu Uipuriap, produkowanej w Finlandii, o gęstości 750 g/m 2 zgodnie z kształtem korpusu w planie. Materiał został przetestowany na dużych poduszkowcach przemysłowych, takich jak Chius, Pegasus i Mars. Aby zwiększyć przeżywalność, cylinder może składać się z kilku przedziałów (w tym przypadku trzech, każdy z własnym zaworem napełniającym). Przedziały z kolei można podzielić wzdłużnie na pół przegrodami podłużnymi (ale ta wersja jest nadal tylko w projekcie). Dzięki tej konstrukcji uszkodzony przedział (lub nawet dwa) umożliwi dalsze poruszanie się po trasie, a tym bardziej dotarcie do brzegu w celu naprawy. W celu ekonomicznego cięcia materiału cylinder jest podzielony na cztery sekcje: część dziobową i dwie sekcje podające. Każda sekcja z kolei jest sklejona z dwóch części (połówek) skorupy: dolnej i górnej - ich wzory są odzwierciedlone. W tej wersji cylindra przegródki i sekcje nie pasują do siebie.

a – skorupa zewnętrzna; b – skorupa wewnętrzna;
1 – część dziobowa; 2 – część boczna (2 szt.); 3 – część rufowa; 4 – przegroda (3 szt.); 5 – zawory (3 szt.); 6 – lyktros; 7 – fartuch
Na górę cylindra przyklejony jest „liktros” – pasek materiału Vinyplan 6545 „Arctic” złożony na pół, z włożonym wzdłuż zakładki plecionym nylonowym sznurkiem, impregnowanym klejem „900I”. Na belkę boczną nakłada się „Liktros”, a cylinder za pomocą plastikowych śrub mocuje się do aluminiowej listwy przymocowanej do nadwozia. Ten sam pasek (tylko bez dołączonego sznurka) przykleja się do cylindra i od dołu z przodu („o wpół do siódmej”) tzw. „fartuch” – do którego przykleja się górne części segmentów (języków) elastyczne ogrodzenie są związane. Później do przedniej części cylindra przyklejono gumowy zderzak.
 Miękkie elastyczne ogrodzenie„Aerojipa” (spódnica) składa się z oddzielnych, ale identycznych elementów - segmentów, wyciętych i uszytych z gęstej lekkiej tkaniny lub materiału foliowego. Pożądane jest, aby tkanina była wodoodporna, nie twardniała na zimno i nie przepuszczała powietrza.
Miękkie elastyczne ogrodzenie„Aerojipa” (spódnica) składa się z oddzielnych, ale identycznych elementów - segmentów, wyciętych i uszytych z gęstej lekkiej tkaniny lub materiału foliowego. Pożądane jest, aby tkanina była wodoodporna, nie twardniała na zimno i nie przepuszczała powietrza.
Użyłem ponownie materiału Vinyplan 4126, tyle że o mniejszej gęstości (240 g/m2), ale domowa tkanina typu perkal jest w zupełności wystarczająca.
Segmenty są nieco mniejsze niż w modelu „bez balonika”. Wzór segmentu jest prosty i można go uszyć samodzielnie, nawet ręcznie lub zespawać prądami wysokiej częstotliwości (HFC).
Segmenty mocuje się języczkiem wieczka do uszczelki balonu (dwa - na jednym końcu, natomiast węzły znajdują się wewnątrz, pod fartuchem) na całym obwodzie Aeroamphibiana. Dwa dolne narożniki segmentu, za pomocą nylonowych zacisków konstrukcyjnych, zawieszone są swobodnie na stalowej linie o średnicy 2 - 2,5 mm, opasującej dolną część wewnętrznej powłoki korpusu. W sumie spódnica pomieści aż 60 segmentów. Do korpusu mocowana jest stalowa linka o średnicy 2,5 mm za pomocą klipsów, które z kolei przyciągane są do wewnętrznej skorupy za pomocą nitów płytkowych.


1 – szalik (materiał „Viniplan 4126”); 2 – język (materiał „Viniplan 4126”); 3 – nakładka (tkanina arktyczna)
To mocowanie segmentów osłonowych nie przekracza znacząco czasu potrzebnego na wymianę uszkodzonego elementu płotu elastycznego w porównaniu z poprzednią konstrukcją, gdy każdy był mocowany osobno. Ale jak pokazała praktyka, spódnica działa nawet wtedy, gdy ulegnie awarii do 10% segmentów i nie jest wymagana ich częsta wymiana.

1 – płaszcz zewnętrzny obudowy; 2 – wewnętrzna skorupa ciała; 3 - nakładka (włókno szklane) 4 - listwa (duraluminium, listwa 30x2); 5 – wkręt samogwintujący; 6 – linia cylindra; 7 – śruba z tworzywa sztucznego; 8 – balon; 9 – fartuch cylindra; 10 – segment; 11 – sznurowanie; 12 – klips; 13-zacisk (plastikowy); 14-kabel d2,5; Nit przedłużający 15; 16-oczkowe
Instalacja śmigła składa się z silnika, sześciołopatowego śmigła (wentylator) i przekładni.
Silnik– RMZ-500 (analog Rotaxa 503) ze skutera śnieżnego Taiga. Wyprodukowany przez Russian Mechanics OJSC na licencji austriackiej firmy Rotax. Silnik jest dwusuwowy, z płatkowym zaworem wlotowym i wymuszonym chłodzeniem powietrzem. Sprawdził się jako niezawodny, dość mocny (około 50 KM) i niezbyt ciężki (około 37 kg), a co najważniejsze, stosunkowo niedrogi. Paliwo - benzyna AI-92 zmieszana z olejem do silników dwusuwowych (na przykład krajowy MGD-14M). Średnie zużycie paliwa wynosi 9 – 10 l/h. Silnik zamontowany jest w tylnej części pojazdu, na uchwycie silnika przymocowanym do spodu kadłuba (a raczej do drewnianej płyty pod silnikiem). Motorama stała się wyższa. Odbywa się to dla wygody oczyszczenia tylnej części kokpitu ze śniegu i lodu, które przedostają się tam przez burty i gromadzą się tam, a po zatrzymaniu zamarzają.

1 – wał wyjściowy silnika; 2 – koło zębate napędowe (32 zęby); 3 – pasek zębaty; 4 – napędzane koło zębate; 5 – nakrętka M20 do mocowania osi; 6 – tuleje dystansowe (3 szt.); 7 – łożysko (2 szt.); 8 – oś; 9 – tuleja śrubowa; 10 – wspornik tylnego amortyzatora; 11 – przednia podpora nadsilnika; 12 - przedni dwunożny wspornik usztywniający (nie pokazany na rysunku, patrz zdjęcie); 13 – policzek zewnętrzny; 14 – wewnętrzny policzek
Śmigło sześciołopatowe o stałym skoku i średnicy 900 mm. (Podjęto próbę montażu dwóch pięciołopatowych śmigieł współosiowych, ale nie powiodła się). Tuleja śruby wykonana jest z odlewu aluminiowego. Ostrza wykonane są z włókna szklanego, pokrytego żelkotem. Wydłużono oś piasty śmigła, choć pozostały na niej te same łożyska 6304. Oś osadzono na stojaku nad silnikiem i zabezpieczono tu dwoma tulejkami dystansowymi: dwubelkową z przodu i trójbelkową w tył. Przed śmigłem znajduje się osłona siatkowa, a z tyłu pióra steru.
Przeniesienie momentu obrotowego (obrotu) z wału wyjściowego silnika na piastę śmigła odbywa się za pomocą paska zębatego o przełożeniu 1:2,25 (koło napędowe ma 32 zęby, a koło napędzane 72).
Strumień powietrza ze śmigła rozdzielany jest przez przegrodę w pierścieniowym kanale na dwie nierówne części (w przybliżeniu 1:3). Mniejsza jej część trafia pod dno kadłuba, tworząc poduszkę powietrzną, a większa część generuje siłę napędową (trakcję) niezbędną do ruchu. Kilka słów o cechach prowadzenia płaza, a konkretnie o rozpoczęciu ruchu. Gdy silnik pracuje na biegu jałowym, urządzenie pozostaje nieruchome. Wraz ze wzrostem liczby obrotów płaz najpierw unosi się nad powierzchnię nośną, a następnie zaczyna poruszać się do przodu z obrotami od 3200 do 3500 na minutę. W tym momencie ważne jest, szczególnie przy starcie z ziemi, aby pilot uniósł najpierw tylną część urządzenia: wtedy tylne segmenty o nic nie zaczepią, a przednie będą ślizgać się po nierównych powierzchniach i przeszkodach.


1 – podstawa (blacha s6, 2 szt.); 2 – stojak portalowy (blacha s4,2 szt.); 3 – zworka (blacha s10, 2 szt.)
Sterowanie Aerojeepem (zmiana kierunku ruchu) odbywa się za pomocą sterów aerodynamicznych, przymocowanych zawiasowo do pierścieniowego kanału. Kierownicę odchyla się za pomocą dwuramiennej dźwigni (kierownica motocyklowa) poprzez włoską linkę Bowdena biegnącą do jednej z płaszczyzn aerodynamicznej kierownicy. Druga płaszczyzna jest połączona z pierwszym sztywnym prętem. Dźwignia sterowania przepustnicą gaźnika lub „spust” ze skutera śnieżnego „Taiga” jest przymocowana do lewego uchwytu dźwigni.

1 – kierownica; 2 – Cięgno Bowdena; 3 – element do mocowania oplotu do korpusu (2 szt.); 4 – Linka w oplocie Bowdena; 5 – panel sterowania; 6 – dźwignia; 7 – przyczepność (fotel bujany nie jest pokazany); 8 – łożysko (4 szt.)
Hamowanie odbywa się poprzez „puszczenie gazu”. W takim przypadku poduszka powietrzna znika, a urządzenie opiera się całym ciałem o wodę (lub narty na śniegu lub ziemi) i zatrzymuje się na skutek tarcia.
Sprzęt i urządzenia elektryczne. Urządzenie wyposażone jest w akumulator, obrotomierz z licznikiem godzin, woltomierz, wskaźnik temperatury głowicy silnika, reflektory halogenowe, przycisk i stacyjkę na kierownicy itp. Silnik uruchamiany jest za pomocą rozrusznika elektrycznego. Istnieje możliwość montażu dowolnych innych urządzeń.
Amfibia otrzymała nazwę „Rybak-360”. Przeszedł próby morskie na Wołdze: w 2010 roku na wiecu firmy Velkhod we wsi Emaus koło Tweru, w Niżnym Nowogrodzie. Na zlecenie Moskomsport brał udział w występach pokazowych na festiwalu poświęconym Dniu Marynarki Wojennej w Moskwie na Kanale Wioślarskim.
Dane techniczne aeroamfii:
Wymiary całkowite, mm:
długość…………………………………………………………………………..3950
szerokość……………………………………………………………………………..2400
wzrost……………………………………………………………………….1380
Moc silnika, KM………………………………………….52
Waga, kg………………………………………………………………………….150
Nośność, kg………………………………………………………….370
Pojemność paliwa, l………………………………………………………….12
Zużycie paliwa, l/h……………………………………………..9 - 10
Przeszkody do pokonania:
wstawaj, witaj…………………………………………………………….20
fala, m……………………………………………………………………………0,5
Prędkość przelotowa, km/h:
drogą wodną…………………………………………………………………………….50
na ziemi………………………………………………………………………54
na lodzie………………………………………………………………………….60
M. JAGUBOW Honorowy wynalazca Moskwy
Konstrukcję pojazdu umożliwiającego poruszanie się zarówno na lądzie, jak i na wodzie poprzedziło zapoznanie się z historią odkrycia i powstania oryginalnych płazów - poduszkowiec(AVP), badanie ich podstawowej struktury, porównanie różnych konstrukcji i obwodów.
W tym celu odwiedziłem wiele stron internetowych entuzjastów i twórców WUA (w tym zagranicznych), a z niektórymi spotkałem się osobiście.
Ostatecznie prototyp planowanej łodzi przejął angielski poduszkowiec („pływający statek” – tak w Wielkiej Brytanii nazywa się AVP), zbudowany i przetestowany przez lokalnych pasjonatów. Nasze najciekawsze domowe maszyny tego typu tworzone były głównie dla organów ścigania, a w ostatnich latach - w celach komercyjnych, miały duże gabaryty i dlatego nie bardzo nadawały się do produkcji amatorskiej.

Mój poduszkowiec (nazywam go „Aerojeep”) jest trzymiejscowy: pilot i pasażerowie są ułożeni w kształcie litery T, jak na trójkołowym rowerze: pilot znajduje się z przodu pośrodku, a pasażerowie z tyłu, obok siebie drugi, jeden obok drugiego. Maszyna jest jednosilnikowa, z podzielonym przepływem powietrza, dla której w pierścieniowym kanale nieco poniżej jej środka zamontowany jest specjalny panel.
| Dane techniczne poduszkowca | |
|---|---|
| Wymiary całkowite, mm: | |
| długość | 3950 |
| szerokość | 2400 |
| wysokość | 1380 |
| Moc silnika, l. Z. | 31 |
| Waga (kg | 150 |
| Nośność, kg | 220 |
| Pojemność paliwa, l | 12 |
| Zużycie paliwa, l/h | 6 |
| Przeszkody do pokonania: | |
| wzrost, stopień. | 20 |
| fala, m | 0,5 |
| Prędkość przelotowa, km/h: | |
| na wodzie | 50 |
| na ziemi | 54 |
| na lodzie | 60 |
Składa się z trzech głównych części: zespołu śmigła-silnika z przekładnią, korpusu z włókna szklanego i „spódnicy” - elastycznego płotu dla dolnej części korpusu - że tak powiem, „poszewki” poduszki powietrznej.
 1 - segment (gruba tkanina); 2 - knaga cumownicza (3 szt.); 3 - osłona przeciwwiatrowa; 4 - listwa boczna do mocowania segmentów; 5 - uchwyt (2 szt.); 6 - osłona śmigła; 7 - kanał pierścieniowy; 8 - ster (2 szt.); 9 - dźwignia sterowania na kierownicy; 10 - właz dostępowy do zbiornika gazu i akumulatora; 11 - fotel pilota; 12 - sofa pasażerska; 13 - obudowa silnika; 14 - silnik; 15 - skorupa zewnętrzna; 16 - wypełniacz (pianka); 17 - skorupa wewnętrzna; 18 - panel dzielący; 19 - śmigło; 20 - piasta śmigła; 21 - pasek rozrządu; 22 - węzeł do mocowania dolnej części segmentu. powiększ, 2238x1557, 464 KB |
kadłub poduszkowca
Jest podwójny: włókno szklane, składa się z powłoki wewnętrznej i zewnętrznej.
Zewnętrzna skorupa ma dość prostą konfigurację - to po prostu nachylone (około 50° do poziomu) boki bez dna - płaska na niemal całej szerokości i lekko zakrzywiona w górnej części. Dziób jest zaokrąglony, a tył ma wygląd pochylonej pawęży. W górnej części, wzdłuż obwodu płaszcza zewnętrznego, wycięte są podłużne otwory-rowki, a od dołu, od zewnątrz, w śrubach oczkowych zamocowana jest lina otaczająca płaszcz, służąca do mocowania do niego dolnych części segmentów .
Powłoka wewnętrzna ma bardziej złożoną konfigurację niż skorupa zewnętrzna, ponieważ zawiera prawie wszystkie elementy małego statku (powiedzmy pontonu lub łodzi): burty, dno, zakrzywione burty, mały pokład na dziobie (tylko brak górnej części pawęży na rufie) - w trakcie kompletowania jako jeden detal. Dodatkowo, pośrodku kokpitu, wzdłuż niego, do dolnej części przyklejony jest oddzielnie uformowany tunel z kanistrem pod fotelem kierowcy, w którym mieści się zbiornik paliwa i akumulator, a także linki gazu i linki sterowania.
W tylnej części skorupy wewnętrznej znajduje się rodzaj rufy, podniesionej i otwartej z przodu. Służy jako podstawa pierścieniowego kanału dla śmigła, a jego zworka służy jako separator przepływu powietrza, którego część (przepływ podtrzymujący) kierowana jest do otworu wału, a druga część służy do wytworzenia napędowej siły trakcyjnej .
Wszystkie elementy korpusu: skorupa wewnętrzna i zewnętrzna, tunel i kanał pierścieniowy zostały naklejone na matryce wykonane z maty szklanej o grubości około 2 mm na żywicy poliestrowej. Oczywiście żywice te ustępują żywicom winyloestrowym i epoksydowym pod względem przyczepności, stopnia filtracji, skurczu i uwalniania szkodliwych substancji po wyschnięciu, ale mają niezaprzeczalną przewagę cenową - są znacznie tańsze, co ważne. Dla tych, którzy zamierzają stosować takie żywice, przypominam, że pomieszczenie, w którym prowadzone są prace, musi mieć dobrą wentylację i temperaturę co najmniej 22°C.
Matryce wykonano wcześniej według modelu wzorcowego z tych samych mat szklanych na tej samej żywicy poliestrowej, jedynie grubość ich ścianek była większa i wynosiła 7-8 mm (dla skorup obudowy - około 4 mm). Przed sklejeniem elementów z powierzchni roboczej matrycy dokładnie usunięto wszelkie nierówności i zadziory, a następnie pokryto ją trzykrotnie woskiem rozcieńczonym terpentyną i wypolerowano. Następnie za pomocą natryskiwacza (lub wałka) na powierzchnię nałożono cienką warstwę (do 0,5 mm) żelkotu (lakieru kolorowego) o wybranym żółtym kolorze.
Po wyschnięciu rozpoczął się proces klejenia skorupy przy użyciu następującej technologii. W pierwszej kolejności za pomocą wałka woskową powierzchnię matrycy oraz bok maty szklanej o mniejszych porach pokrywa się żywicą, następnie na matrycę nakłada się matę i wałkuje do całkowitego usunięcia powietrza spod warstwy (jeśli jest taka potrzeba, można zrobić małą szczelinę w macie). W ten sam sposób układa się kolejne warstwy mat szklanych na wymaganą grubość (4-5 mm), w razie potrzeby montując wtopione elementy (metal i drewno). Przy klejeniu „na mokro do krawędzi” nadmiarowe skrzydełka na krawędziach są odcinane.
Po stwardnieniu żywicy skorupę można łatwo usunąć z matrycy i poddać obróbce: krawędzie są toczone, wycinane są rowki i wiercone otwory.
Aby zapewnić niezatapialność Aerojeepa, do wewnętrznej skorupy przykleja się kawałki pianki (na przykład mebli), pozostawiając wolne jedynie kanały przepływu powietrza na całym obwodzie. Kawałki styropianu skleja się żywicą i mocuje do wewnętrznej skorupy za pomocą pasków maty szklanej, również nasmarowanej żywicą.
Po oddzielnym wykonaniu powłoki zewnętrznej i wewnętrznej, łączy się je, mocuje za pomocą opasek zaciskowych i wkrętów samogwintujących, a następnie łączy (skleja) po obwodzie za pomocą pasków powlekanych żywicą poliestrową tej samej maty szklanej o szerokości 40-50 mm, od z których wykonano same muszle. Następnie korpus pozostawia się do całkowitego spolimeryzacji żywicy.
Dzień później pasek duraluminium o przekroju 30 x 2 mm mocuje się do górnego połączenia muszli na obwodzie za pomocą nitów zrywalnych, instalując go pionowo (mocowane są na nim języki segmentów). Drewniane płozy o wymiarach 1500x90x20 mm (długość x szerokość x wysokość) przykleja się do dolnej części spodu w odległości 160 mm od krawędzi. Na prowadnice przyklejona jest jedna warstwa maty szklanej. W ten sam sposób, tylko od wewnętrznej strony kadłuba, w tylnej części kokpitu, pod silnikiem montowana jest podstawa z drewnianej płyty.
Warto dodać, że stosując tę samą technologię, w jakiej wykonano osłony zewnętrzne i wewnętrzne, sklejono mniejsze elementy: osłonę wewnętrzną i zewnętrzną dyfuzora, kierownice, zbiornik paliwa, obudowę silnika, owiewkę, tunel i fotel kierowcy. Tym, którzy dopiero zaczynają pracę z włóknem szklanym, polecam przygotowanie produkcji łodzi z tych małych elementów. Całkowita masa korpusu z włókna szklanego wraz z dyfuzorem i sterami wynosi około 80 kg.
Oczywiście produkcję takiego kadłuba można również powierzyć specjalistom - firmom produkującym łodzie i łodzie z włókna szklanego. Na szczęście w Rosji jest ich sporo, a koszty będą porównywalne. Jednak w procesie samodzielnej produkcji możliwe będzie zdobycie niezbędnego doświadczenia i możliwości w przyszłości samodzielnego modelowania i tworzenia różnych elementów i konstrukcji z włókna szklanego.
Poduszkowiec napędzany śmigłem
Zawiera silnik, śmigło i przekładnię, która przenosi moment obrotowy z pierwszego na drugi.
Zastosowany silnik to BRIGGS & STATTION, wyprodukowany w Japonii na licencji amerykańskiej: 2-cylindrowy, w kształcie litery V, czterosuwowy, 31 KM. Z. przy 3600 obr./min. Gwarantowana żywotność wynosi 600 tysięcy godzin. Rozruch odbywa się za pomocą rozrusznika elektrycznego z akumulatora, a świece zapłonowe działają z iskrownika.
Silnik zamontowany jest w dolnej części korpusu Aerojeepa, a oś piasty śmigła jest przymocowana na obu końcach do wsporników znajdujących się pośrodku dyfuzora, uniesionych nad nadwoziem. Przeniesienie momentu obrotowego z wału wyjściowego silnika na piastę odbywa się za pomocą paska zębatego. Koła pasowe napędzane i napędowe, podobnie jak pasek, są uzębione.
Choć masa silnika nie jest zbyt duża (około 56 kg), to jego umiejscowienie na dnie znacznie obniża środek ciężkości łodzi, co pozytywnie wpływa na stabilność i zwrotność maszyny, zwłaszcza „lotniczej” jeden.
Spaliny odprowadzane są do dolnego strumienia powietrza.
Zamiast zainstalowanego japońskiego można zastosować odpowiednie silniki domowe, na przykład ze skuterów śnieżnych „Buran”, „Lynx” i innych. Nawiasem mówiąc, w przypadku jedno- lub dwumiejscowego AVP odpowiednie są mniejsze silniki o mocy około 22 KM. Z.
Śmigło jest sześciołopatowe, ze stałym skokiem (kątem natarcia ustawionym na lądzie) łopatek.
 1 - ściany; 2 - przykryj językiem. |
Za integralną część instalacji silnika śmigłowego należy również uznać kanał pierścieniowy śmigła, chociaż jego podstawa (dolny sektor) jest integralna z wewnętrznym płaszczem obudowy. Kanał pierścieniowy, podobnie jak korpus, również jest kompozytowy, sklejony z powłoki zewnętrznej i wewnętrznej. Właśnie w miejscu połączenia jej dolnego sektora z górnym montowana jest przegroda z włókna szklanego, która oddziela przepływ powietrza wytwarzany przez śmigło (i odwrotnie, łączy ściany dolnego sektora wzdłuż cięciwy).
Silnik, umieszczony na pawęży w kokpicie (za oparciem siedzenia pasażera), przykryty jest od góry maską z włókna szklanego, a śmigło oprócz dyfuzora jest również osłonięte z przodu drucianą kratką.
Miękkie, elastyczne ogrodzenie poduszkowca (spódnica) składa się z oddzielnych, ale identycznych segmentów, wyciętych i uszytych z gęstej, lekkiej tkaniny. Pożądane jest, aby tkanina była wodoodporna, nie twardniała na zimno i nie przepuszczała powietrza. Użyłem fińskiego materiału Vinyplan, ale krajowa tkanina typu perkal jest całkiem odpowiednia. Wzór segmentu jest prosty i można go nawet uszyć ręcznie.
Każdy segment jest przymocowany do korpusu w następujący sposób. Język umieszcza się nad boczną pionową listwą z zakładką 1,5 cm; na nim znajduje się pióro sąsiedniego segmentu, a oba w miejscu zachodzenia na siebie mocuje się do pręta specjalnym zaciskiem krokodylkowym, tylko bez zębów. I tak dalej na całym obwodzie Aerojeepa. Aby zapewnić niezawodność, możesz również umieścić klips na środku języka. Dwa dolne narożniki segmentu zawieszone są swobodnie za pomocą nylonowych zacisków na kablu owijanym wokół dolnej części zewnętrznej osłony obudowy.
Ta kompozytowa konstrukcja spódnicy pozwala na łatwą wymianę uszkodzonego segmentu, co zajmie 5-10 minut. Można by powiedzieć, że projekt działa, gdy zawiedzie aż 7% segmentów. Łącznie na spódnicy umieszczono aż 60 sztuk.
Zasada ruchu poduszkowiec Następny. Po uruchomieniu silnika i pracy na biegu jałowym urządzenie pozostaje na swoim miejscu. Wraz ze wzrostem prędkości śmigło zaczyna napędzać silniejszy przepływ powietrza. Jego część (duża) wytwarza siłę napędową i zapewnia ruch łodzi do przodu. Pozostała część strumienia przepływa pod ścianą działową do bocznych kanałów powietrznych kadłuba (wolna przestrzeń między płaszczami aż do samego dziobu), a następnie przez szczeliny w poszyciu zewnętrznym równomiernie przedostaje się do segmentów. Przepływ ten, jednocześnie z początkiem ruchu, tworzy pod dnem poduszkę powietrzną, unosząc aparat nad znajdującą się pod nim powierzchnię (grunt, śnieg lub wodę) o kilka centymetrów.
Obrót Aerojeepa odbywa się za pomocą dwóch sterów, które odchylają „do przodu” strumień powietrza na bok. Sterowanie kierownicami odbywa się za pomocą dwuramiennej dźwigni kolumny kierownicy typu motocyklowego, poprzez linkę Bowdena biegnącą wzdłuż prawej burty pomiędzy osłonami do jednej z kierownic. Druga kierownica jest połączona z pierwszą za pomocą sztywnego drążka.
Dźwignia sterowania przepustnicą gaźnika (analogicznie do uchwytu przepustnicy) jest również przymocowana do lewego uchwytu dźwigni dwuramiennej.
Aby móc obsługiwać poduszkowiec, należy go zarejestrować w lokalnym Państwowym Inspekcji Małych Statków (GIMS) i uzyskać bilet na statek. Aby uzyskać uprawnienia do kierowania łodzią, należy także ukończyć szkolenie z zakresu kierowania łodzią.
Jednak nawet na tych kursach nadal nie ma instruktorów pilotowania poduszkowców. Dlatego każdy pilot musi samodzielnie opanować zarządzanie AVP, dosłownie krok po kroku zdobywając odpowiednie doświadczenie.
Poduszkowiec przy minimalnych kosztach pieniężnych i płytkiej wiedzy w dziedzinie tworzenia poduszkowców.
Zgromadzenie SVP zostało przeprowadzone na wydziale Państwowego Uniwersytetu Technicznego w Saratowie przez jego studentów. Zdjęcia i filmy zostały wykonane aparatem HTC Mozart.
Pomysł na projekt
Ten nieco szalony pomysł sprowadzał się do stworzenia modelu poduszkowca sterowanego sygnałem radiowym. Poduszkowiec ten potrafi latać nad małymi przeszkodami (tak jak robią to ekranoplany klasy B, a nawet C). W planach jest instalacja technicznego systemu wizyjnego, który będzie automatycznie wykrywał przeszkody i pomagał je pokonać. System ten będzie także w stanie identyfikować SVP podobnych do siebie i śledzić ich. Jeśli projekt zakończy się pomyślnie, zostanie wypuszczona grupa poduszkowców z możliwością sterowania tylko jednym ze statków.
Niezbędne materiały i sprzęt
Do stworzenia poduszkowca wymagane były następujące materiały i sprzęt:
penoplex - 2(3) sztuki (500 lub 750 rub.)
styropian - 2 tory po 1,5 metra każdy (łącznie 900 RUR)
dwustronna taśma materiałowa - 1 sztuka za 50 rubli.
klej „Titan” - 1 sztuka 80 rub.
cerata medyczna - 1(3) szt. 100 RUR (300 RUR)
regulator prędkości - 2(3) sztuki 2540 RUR (3810 RUR)
silnik - 2 (4) sztuki za 3110 rubli (6220 rubli)
bateria - 2 sztuki za 2360 rub.
śmigło - 2 (7-10) sztuk 300 rub. (600 rubli)
serwonapęd - 1 szt., przekazywany autorom gratis
Sterowanie radiowe 6-kanałowe - 1 zestaw gratis
W rezultacie wydano 15 070 rubli. przy maksymalnym zużyciu materiałów. Jak widać budżet jest niewielki i można go nawet zmniejszyć do 9940 rubli.
Proces montażu SVP
W pierwszej kolejności zakupiono wszystkie brakujące materiały: 2 akumulatory, 2 silniki, a także 2 komplety śmigieł, klej, taśmę, styropian. A autorzy mieli na wydziale 6-kanałowy sprzęt radiowy.
Na główny materiał korpusu poduszkowca bez wątpienia wybrano Penoplex ze względu na jego lekkość, wytrzymałość i łatwość nadawania różnorodnych kształtów.
Twórcy odkryli, że silnik wykorzystując regulatory prędkości, nawet bez poduszki powietrznej, pracując na 50%, doskonale unosił nadwozie w powietrze.

Uchwyt silnika został wycięty z używanego korpusu. zasilacz.


Spódnica została uszyta z jednego kawałka, z wycięciem pośrodku (wycięte kawałki folii nie zmieściły się w spódnicę).

Spódnica została wykonana według następującej zasady:

Dalszy proces klejenia dołu spódnicy SVP opisano na zdjęciu i filmie:




Część ogonową statku wykonano z polistyrenu.




Rezultatem było:

Pozostałości nadwozia wykorzystano do stworzenia drugiego silnika.

Wszystkie elementy SVP zostały przykręcone długimi wkrętami samogwintującymi do penoplexu. Trzymają się bardzo mocno.

Po zakończeniu prac nad penopleksem ukryto wszystkie nieprawidłowości i niedociągnięcia oraz wycięto pojemniki na rurę siarkową i baterie.


Kierownice i tapicerka również zostały wykonane z polistyrenu.




Układ kręcący kierownicę powstał z części pozostałych po starym manipulatorze.
 Pewnej zimy, kiedy spacerowałem brzegiem Dźwiny i patrzyłem na łodzie pokryte śniegiem, pomyślałem: stworzyć pojazd całoroczny, czyli płaza, z którego można korzystać zimą.
Pewnej zimy, kiedy spacerowałem brzegiem Dźwiny i patrzyłem na łodzie pokryte śniegiem, pomyślałem: stworzyć pojazd całoroczny, czyli płaza, z którego można korzystać zimą.
Po długim namyśle mój wybór padł na podwójną poduszkowiec. Na początku nie miałem nic poza wielką chęcią stworzenia takiej konstrukcji. W dostępnej mi literaturze technicznej podsumowano doświadczenia związane z tworzeniem wyłącznie dużych poduszkowców, natomiast nie udało mi się znaleźć żadnych danych na temat małych urządzeń do celów rekreacyjnych i sportowych, tym bardziej, że nasza branża nie produkuje takich poduszkowców. Można więc było polegać tylko na własnych siłach i doświadczeniu (moja łódź-amfibia wzorowana na motorówce Yantar była kiedyś donoszona w KYa; zob. nr 61).
 Przewidując, że w przyszłości być może będę miał naśladowców, a jeśli wyniki będą pozytywne, moim urządzeniem może zainteresować się także przemysł, postanowiłem zaprojektować je w oparciu o dobrze rozwinięte i dostępne na rynku silniki dwusuwowe.
Przewidując, że w przyszłości być może będę miał naśladowców, a jeśli wyniki będą pozytywne, moim urządzeniem może zainteresować się także przemysł, postanowiłem zaprojektować je w oparciu o dobrze rozwinięte i dostępne na rynku silniki dwusuwowe.
Zasadniczo poduszkowiec doświadcza znacznie mniejszych naprężeń niż tradycyjny kadłub łodzi ślizgowej; dzięki temu jego konstrukcja może być lżejsza. Jednocześnie pojawia się dodatkowy wymóg: korpus urządzenia musi charakteryzować się niskim oporem aerodynamicznym. Należy to wziąć pod uwagę przy opracowywaniu rysunku teoretycznego.
| Podstawowe dane poduszkowca-amfibii | |
|---|---|
| Długość, m | 3,70 |
| Szerokość, m | 1,80 |
| Wysokość boku, m | 0,60 |
| Wysokość poduszki powietrznej, m | 0,30 |
| Moc jednostki podnoszącej, l. Z. | 12 |
| Moc jednostki trakcyjnej, l. Z. | 25 |
| Ładowność, kg | 150 |
| Całkowita waga, kg | 120 |
| Prędkość, km/h | 60 |
| Zużycie paliwa, l/h | 15 |
| Pojemność zbiornika paliwa, l | 30 |

1 - kierownica; 2 - tablica przyrządów; 3 - siedzenie wzdłużne; 4 - wentylator podnoszący; 5 - obudowa wentylatora; 6 - wentylatory trakcyjne; 7 - koło pasowe wału wentylatora; 8 - koło pasowe silnika; 9 - silnik trakcyjny; 10 - tłumik; 11 - klapy kontrolne; 12 - wał wentylatora; 13 - łożyska wału wentylatora; 14 - przednia szyba; 15 - elastyczne ogrodzenie; 16 - wentylator trakcyjny; 17 - obudowa wentylatora trakcyjnego; 18 - silnik podnoszący; 19 - podnoszenie tłumika silnika; 20 - rozrusznik elektryczny; 21 - bateria; 22 - zbiornik paliwa.
Body kit zrobiłem z listew świerkowych o przekroju 50x30 i okleiłem sklejką 4mm z klejem epoksydowym. Nie pokryłem go włóknem szklanym, w obawie przed zwiększeniem wagi urządzenia. Aby zapewnić niezatapialność, w każdym z bocznych przedziałów zamontowano po dwie wodoodporne przegrody, a przedziały dodatkowo wypełniono pianką.
Wybrano schemat elektrowni dwusilnikowej, tj. jeden z silników pracuje nad podniesieniem aparatu, tworząc pod jego dnem nadciśnienie (poduszkę powietrzną), a drugi zapewnia ruch - wytwarza ciąg poziomy. Z obliczeń wynika, że silnik podnoszący powinien mieć moc 10-15 KM. Z. Na podstawie podstawowych danych silnik ze skutera Tula-200 okazał się najodpowiedniejszy, ale ponieważ ani mocowania, ani łożyska nie spełniały go ze względów konstrukcyjnych, trzeba było odlać nową skrzynię korbową ze stopu aluminium. Silnik ten napędza 6-łopatkowy wentylator o średnicy 600 mm. Całkowita masa agregatu podnoszącego wraz z mocowaniami i rozrusznikiem elektrycznym wynosiła około 30 kg.
Jednym z najtrudniejszych etapów było wykonanie spódnicy – elastycznej poduszki-obudowy, która szybko ulega zużyciu podczas użytkowania. Zastosowano dostępną w handlu tkaninę plandekową o szerokości 0,75 m. Ze względu na skomplikowaną konfigurację połączeń potrzebne było około 14 m takiej tkaniny. Listwę pocięto na kawałki równe długości boku, z uwzględnieniem dość skomplikowanego kształtu połączeń. Po nadaniu wymaganego kształtu złącza zostały zszyte. Krawędzie tkaniny przymocowano do korpusu aparatu za pomocą pasków duraluminium 2x20. Aby zwiększyć odporność na zużycie, zamontowane elastyczne ogrodzenie zaimpregnowałem klejem gumowym, do którego dodałem proszek aluminiowy, co nadało mu elegancki wygląd. Technologia ta umożliwia przywrócenie elastycznego płotu w razie wypadku i jego zużycia, podobnie jak przedłużenie bieżnika opony samochodowej. Należy podkreślić, że wykonanie ogrodzeń elastycznych nie tylko zajmuje dużo czasu, ale wymaga szczególnej staranności i cierpliwości.
Zmontowano kadłub i zainstalowano elastyczne ogrodzenie z stępką do góry. Następnie rozwinięto kadłub i w szybie o wymiarach 800x800 zamontowano zespół napędowy. Zainstalowano system sterowania instalacją i teraz nadszedł najważniejszy moment; przetestować to. Czy obliczenia będą uzasadnione, czy silnik o stosunkowo małej mocy udźwignie takie urządzenie?
Już przy średnich obrotach silnika płaz uniósł się razem ze mną i zawisł na wysokości około 30 cm nad ziemią. Rezerwa siły nośnej okazała się wystarczająca, aby na rozgrzanym silniku unieść nawet cztery osoby na pełnych obrotach. Już w pierwszych minutach testów zaczęły wyłaniać się cechy urządzenia. Po odpowiednim ustawieniu poruszał się swobodnie na poduszce powietrznej w dowolnym kierunku, nawet przy niewielkiej przyłożonej sile. Miał wrażenie, że unosi się na powierzchni wody.
Inspiracją był dla mnie sukces pierwszego testu instalacji dźwigowej i kadłuba jako całości. Po zabezpieczeniu przedniej szyby zacząłem montować zespół napędowy trakcyjny. Początkowo wydawało się wskazane, aby skorzystać z bogatego doświadczenia w budowie i eksploatacji skuterów śnieżnych i zainstalować na pokładzie rufowym silnik ze śmigłem o stosunkowo dużej średnicy. Należy jednak wziąć pod uwagę, że taka „klasyczna” wersja znacznie zwiększyłaby środek ciężkości tak małego urządzenia, co nieuchronnie odbiłoby się na jego właściwościach jezdnych i, co najważniejsze, na bezpieczeństwie. Dlatego zdecydowałem się zastosować dwa silniki trakcyjne, całkowicie podobne do silnika dźwigowego, i zamontowałem je na rufie płaza, ale nie na pokładzie, a wzdłuż burt. Po wyprodukowaniu i zamontowaniu napędu sterującego typu motocyklowego oraz zamontowaniu śmigieł trakcyjnych o stosunkowo małej średnicy („wentylatorów”), pierwsza wersja poduszkowca była gotowa do prób morskich.
Do transportu płaza za samochodem Zhiguli zbudowano specjalną przyczepę, na którą latem 1978 roku załadowałem moje urządzenie i zawiozłem na łąkę nad jeziorem niedaleko Rygi. Nadszedł ekscytujący moment. W otoczeniu przyjaciół i ciekawskich ludzi usiadłem za kierownicą, uruchomiłem silnik podnoszący i moja nowa łódka zawisła nad łąką. Uruchomiono oba silniki trakcyjne. W miarę jak zwiększała się liczba ich obrotów, płazy zaczęły przemieszczać się po łące. I wtedy okazało się, że wieloletnie doświadczenie w prowadzeniu samochodu i motorówki zdecydowanie nie wystarczy. Wszystkie poprzednie umiejętności nie są już odpowiednie. Konieczne jest opanowanie metod sterowania poduszkowcem, który może kręcić się w nieskończoność w jednym miejscu, niczym bączek. Wraz ze wzrostem prędkości zwiększał się także promień skrętu. Wszelkie nierówności powierzchni powodowały obracanie się urządzenia.
Po opanowaniu sterowania skierowałem płaza wzdłuż łagodnie opadającego brzegu w stronę powierzchni jeziora. Gdy urządzenie znalazło się nad wodą, natychmiast zaczęło tracić prędkość. Silniki trakcyjne zaczęły jeden po drugim zgasnąć, zalane sprayem wydobywającym się spod elastycznej obudowy poduszki powietrznej. Przechodząc przez zarośnięte obszary jeziora, wachlarze wsysały trzciny, przez co krawędzie ich łopatek ulegały odbarwieniu. Kiedy wyłączyłem silniki, a następnie zdecydowałem się spróbować wystartować z wody, nic się nie stało: moje urządzenie nigdy nie było w stanie wydostać się z „dziury” utworzonej przez poduszkę.
W sumie to była porażka. Jednak pierwsza porażka mnie nie powstrzymała. Doszedłem do wniosku, że biorąc pod uwagę istniejącą charakterystykę, moc układu trakcyjnego jest niewystarczająca dla mojego poduszkowca; dlatego startując z powierzchni jeziora, nie mógł ruszyć do przodu.
 Zimą 1979 roku całkowicie przeprojektowałem płaza, zmniejszając długość jego korpusu do 3,70 m i szerokość do 1,80 m. Zaprojektowałem także zupełnie nowy zespół trakcyjny, całkowicie chroniony przed zachlapaniem oraz kontaktem z trawą i trzcinami. Aby uprościć sterowanie instalacją i zmniejszyć jej masę, zamiast dwóch zastosowano jeden silnik trakcyjny. Zastosowano głowicę napędową 25-konnego silnika zaburtowego Vikhr-M z całkowicie przeprojektowanym układem chłodzenia. Zamknięty układ chłodzenia o pojemności 1,5 litra jest wypełniony środkiem niezamarzającym. Moment obrotowy silnika przekazywany jest na wał „śmigłowy” wentylatora umieszczony w poprzek urządzenia za pomocą dwóch pasów klinowych. Wentylatory sześciołopatkowe wtłaczają powietrze do komory, skąd ono ucieka (jednocześnie chłodząc silnik) za rufą przez kwadratową dyszę wyposażoną w klapy sterujące. Z aerodynamicznego punktu widzenia taki układ trakcyjny najwyraźniej nie jest zbyt doskonały, ale jest dość niezawodny, kompaktowy i wytwarza ciąg około 30 kgf, co okazało się wystarczające.
Zimą 1979 roku całkowicie przeprojektowałem płaza, zmniejszając długość jego korpusu do 3,70 m i szerokość do 1,80 m. Zaprojektowałem także zupełnie nowy zespół trakcyjny, całkowicie chroniony przed zachlapaniem oraz kontaktem z trawą i trzcinami. Aby uprościć sterowanie instalacją i zmniejszyć jej masę, zamiast dwóch zastosowano jeden silnik trakcyjny. Zastosowano głowicę napędową 25-konnego silnika zaburtowego Vikhr-M z całkowicie przeprojektowanym układem chłodzenia. Zamknięty układ chłodzenia o pojemności 1,5 litra jest wypełniony środkiem niezamarzającym. Moment obrotowy silnika przekazywany jest na wał „śmigłowy” wentylatora umieszczony w poprzek urządzenia za pomocą dwóch pasów klinowych. Wentylatory sześciołopatkowe wtłaczają powietrze do komory, skąd ono ucieka (jednocześnie chłodząc silnik) za rufą przez kwadratową dyszę wyposażoną w klapy sterujące. Z aerodynamicznego punktu widzenia taki układ trakcyjny najwyraźniej nie jest zbyt doskonały, ale jest dość niezawodny, kompaktowy i wytwarza ciąg około 30 kgf, co okazało się wystarczające.
W połowie lata 1979 roku mój aparat ponownie przewieziono na tę samą łąkę. Po opanowaniu sterowania skierowałem go w stronę jeziora. Tym razem, będąc już nad wodą, kontynuował poruszanie się, nie tracąc prędkości, jak na powierzchni lodu. Z łatwością, bez przeszkód, pokonywał płycizny i trzciny; Szczególnie przyjemnie było poruszać się po zarośniętych terenach jeziora, po których nie pozostał nawet mglisty ślad. Na prostym odcinku jeden z właścicieli z silnikiem Vikhr-M ruszył równoległym kursem, ale wkrótce został w tyle.
Opisywany aparat wywołał szczególne zdziwienie wśród miłośników wędkarstwa podlodowego, gdy kontynuowałem testy płaza zimą na lodzie, który był pokryty warstwą śniegu o grubości około 30 cm. Była to prawdziwa przestrzeń na lodzie! Prędkość można zwiększyć do maksymalnej. Nie zmierzyłem tego dokładnie, ale doświadczenie kierowcy pozwala mi powiedzieć, że zbliżało się do 100 km/h. Jednocześnie płaz swobodnie pokonywał głębokie ślady pozostawione przez działa motorowe.
W studiu telewizyjnym w Rydze nakręcono i pokazano krótki film, po którym zacząłem otrzymywać wiele próśb od tych, którzy chcieli zbudować taki amfibię.